Loki
Autonomous vehicle
We built an autonomous vehicle by modifying a golf cart, and it operated around the Seoul National University campus.
This platform consists of LiDAR-based mapping and localization, and RRT-based path planning.
In this project, I was in charge of LiDAR-based mapping and localization.
References
2023
-
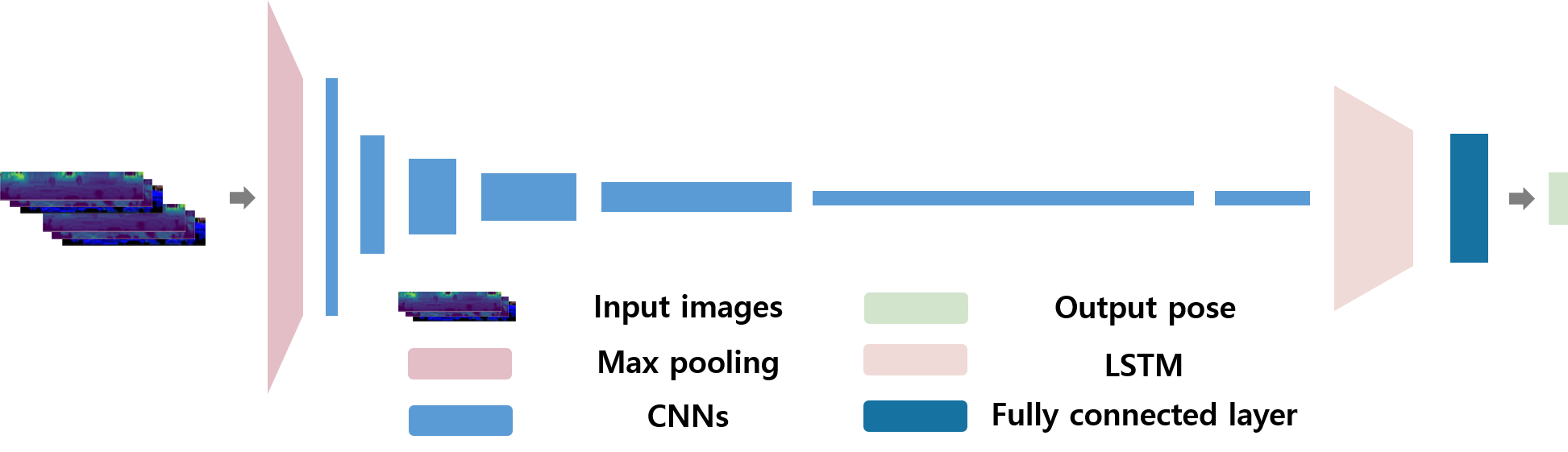 LoRCoN-LO: Long-term Recurrent Convolutional Network-based LiDAR OdometryIn 2023 International Conference on Electronics, Information, and Communication (ICEIC) , 2023
LoRCoN-LO: Long-term Recurrent Convolutional Network-based LiDAR OdometryIn 2023 International Conference on Electronics, Information, and Communication (ICEIC) , 2023