GOTPR
General Outdoor Text-based Place Recognition Using Scene Graph Retrieval with OpenStreetMap
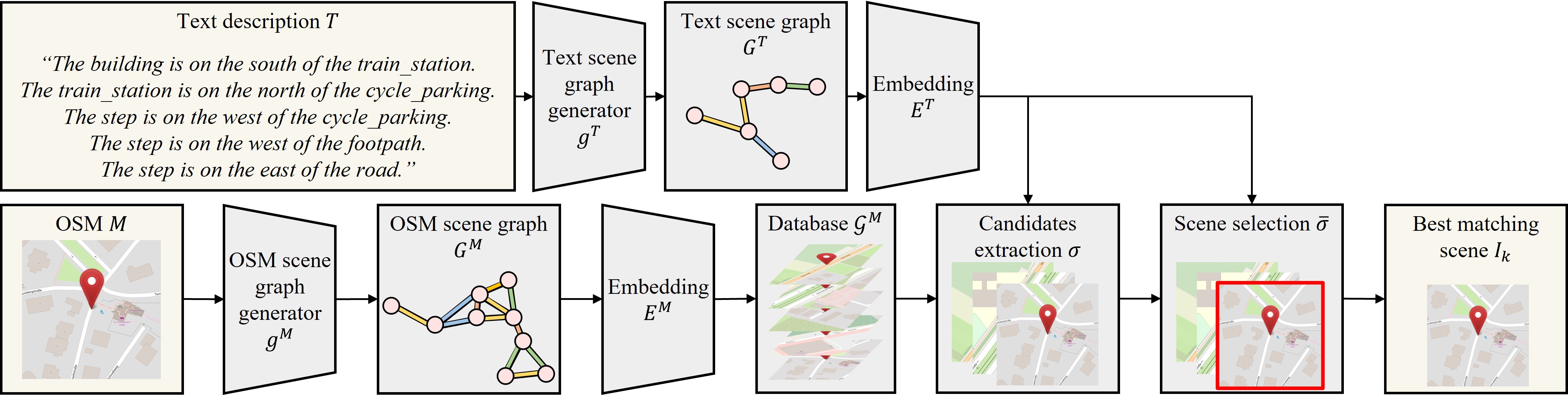
We developed a text-based place recognition system for outdoor robot service scenarios, such as autonomous taxi and delivery robot pickup.
The system converts both natural language descriptions and OpenStreetMap data into graph structures, and estimates the user’s current location by matching them.
In this project, I was responsible for methodology design, data collection, and experimental evaluation.
References
2025
-
 GOTPR: General Outdoor Text-based Place Recognition Using Scene Graph Retrieval with OpenStreetMapIEEE Robotics and Automation Letters (RA-L), 2025
GOTPR: General Outdoor Text-based Place Recognition Using Scene Graph Retrieval with OpenStreetMapIEEE Robotics and Automation Letters (RA-L), 2025